Contratos con Empresas
Investigación, desarrollo e implementación para el aprendizaje y consulta del
lenguaje DACTYLS (DACTYLS, 2019-2021)
Empresa financiadora: ONCE
Objetivo: Desarrollo de una plataforma que facilite el aprendizaje del lenguaje de comunicación para sordo-ciegos DACTYLS
Fase IV del Sistema de Planificación y Optimización Logística (SPOL)
(2018-2020)
Empresa financiadora: ENAGAS
Objetivo: Mantenimiento y mejoras del sistema de gestión desarrollado en las fases anteriores
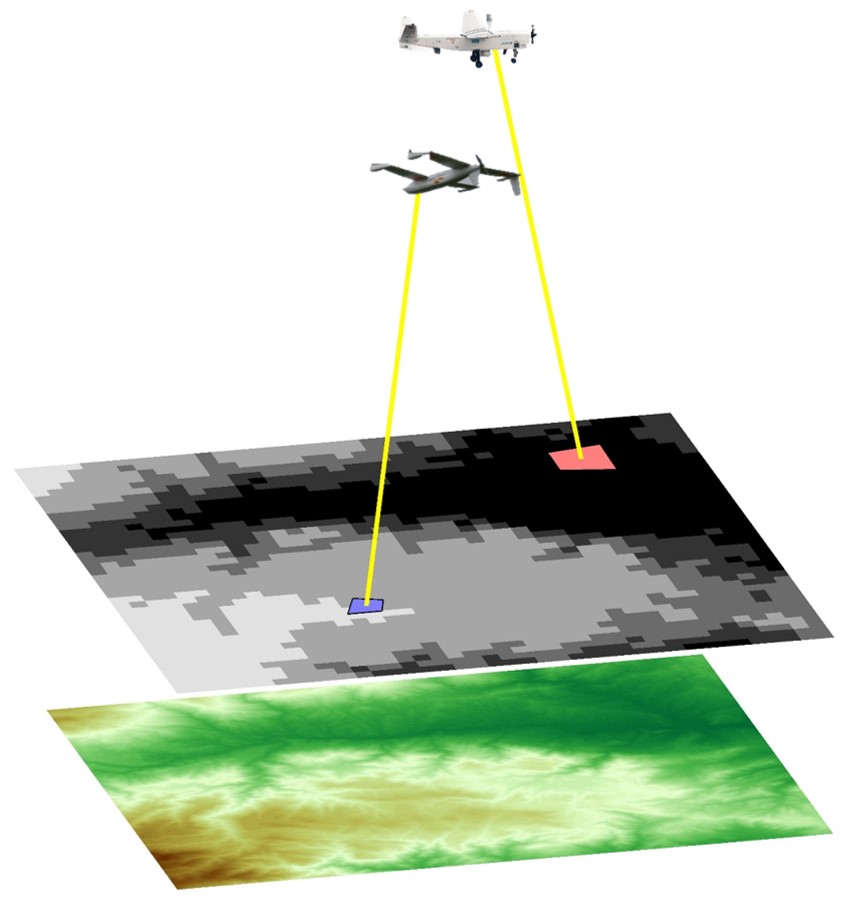
Mission Automation and Autonomy: Trajectory optimization for ISR missions
(MIAA, 2018)
Empresa financiadora: AIRBUS DEFENSE
Objetivo: Desarrollo de algoritmos de planificación de trayectorias de vehículos aereos no tripulados para minimizar el tiempo de búsqueda de objetivos en el entorno marítimo.
Editor Científico (EDICO, 2016-2019)
(2016-2019)
Empresa financiadora: ONCE
Objetivo: Desarrollo de una herramienta para ciegos y personas con discapacidad visual, que les permite editar en tiempo real contenidos científicos matemáticos, físicos o químicos
Fase III del Sistema de Planificación y Optimización Logística (SPOL)
(2016-2017)
Empresa financiadora: ENAGAS
Objetivo: Mantenimiento del sistema de gestión desarrollado en las fases anteriores
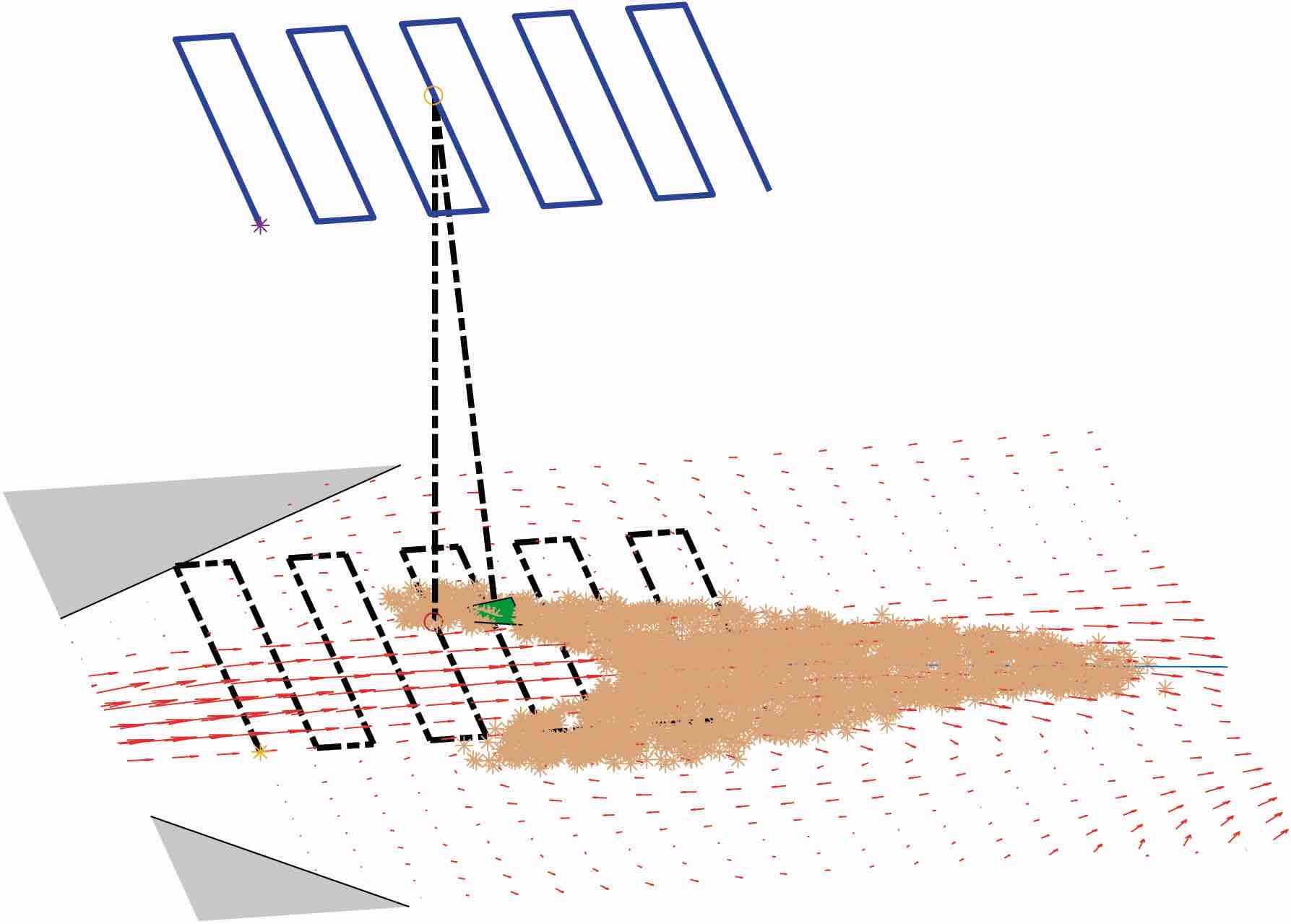
Multi-UAS Minimum Time Search in Dynamic and Uncertain Environments
(SAVIER-TD-02, 2013-2018)
Empresa financiadora: AIRBUS DEFENSE
Objetivo: Desarrollo de algoritmos de planificación de trayectorias flotas de vehículos aereos no tripulados para minimizar el tiempo de búsqueda de objetivos móviles en entornos con incertidumbre.
Fase II del Sistema de Planificación y Optimización Logística (SPOL)
(2012-2013)
Empresa financiadora: ENAGAS
Objetivo: Mejoras en el sistema de gestión desarrollado en la Fase I del proyecto
Viabilidad de sensores basados en tecnología de fibras ópticas para la detección de
fugas de hidrocarburos (2012-2013)
Empresa financiadora: CEPSA
Objetivo: Desarrollo de tecnologías sensoriales basadas en fibra óptica para detección de vertidos de productos petrolíferos en el mar.
Control de Actitud de Nano-microsatélites
(2010-2012)
Empresa financiadora: INTA
Objetivo: Desarrollo del ADCS completo del del satélite INTA Nanosat-1B: Diseño, implementación, verificación y calificación en vuelo del ADCS. Especificación Técnica del AOCS del satélite INTA Microsat-1.
Control de Actitud mediante campo magnético terrestre para Nanosat-1B
(2010)
Empresa financiadora: INTA
Objetivo: Calificación en vuelo de los drivers de los sensores y actuadores del AOCS del satélite INTA Nanosat-1B. Recalibración de los sensores y desarrollo de un ADCS temporal.
Sistema de Planificación y Optimización Logística (SPOL)
(2010-2011)
Empresa financiadora: ENAGAS
Objetivo: Desarrollo de un sistema de gestión y ayuda a la toma de decisiones en el ámbito de la logística de suministro de gas de RDC
Desarrollo de aplicación de segmentación y correspondencia semiautomática para imágenes de plantaciones de Populus (2010)
Empresa financiadora: Centro de Investigación Forestal del Instituto Nacional de Investigación y Tecnología Agraria y Alimentaria (INIA-CIFOR)
Objetivo: Desarrollo de métodos basados en el análisis de texturas y correspondencia esteroescópica en imágenes hemisféricas obtenidas con lentes de ojos de pez en plantaciones de Populus.
Control ACS NanoSat-1B y MicroSat-1 (2008-2009)
Empresa financiadora: INTA
Objetivo:
Visión Esteroscópica para AUTO-ROVER: Investigación aplicada de autonomía
basada en imágenes para ROVER de exploración planetaria (2008-2009)
Empresa financiadora: TCP SISTEMAS E INGENIERíA (fondos CDTI Ref. SAE-20081093)
Objetivo: Desarrollo de métodos basados en visión estereoscópica en entornos adversos para planificación de trayectorias y navegación autónoma de vehículos de exploración planetaria.
AUTO-ROVER: Estudio de autonomía basada en imágenes para Rover de exploración planetaria (2007-2008)
Empresa financiadora: TCP SISTEMAS E INGENIERíA (fondos Consejería de Economía y Consumo de la Comunidad de Madrid, Ref. 04-AEC0800-000035/2008)
Objetivo: Desarrollo de métodos basados en visión estereoscópica en entornos adversos para navegación autónoma de vehículos de exploración planetaria.
Análisis estereoscópico y reconocimiento de texturas en imágenes forestales
obtenidas mediante dispositivo de medición MU-200501738 (2007-2008)
Empresa financiadora: Centro de Investigación Forestal - Instituto Nacional de Investigación y Tecnología
Agraria y Alimentaria
Objetivo: Desarrollo de algoritmos de visión por computador para analizar el estado de masas forestales
Técnicas de tratamiento de imágenes orientadas a vehículos autónomos rovers en
la superficie de Marte (2007-2008)
Empresa financiadora: TCP SISTEMAS E INGENIERÍA
Objetivo: Desarrollo de algoritmos de visión por computador para la navegación de un vehículos autónomo en Marte
Evaluación de técnicas de inteliegencia articificial para la toma de decisiones y
optimización de estrategias (2006-2007)
Empresa financiadora: EADS CASA
Objetivo: Evaluación de técnicas de inteligencia artificial para la planificación de rutas de vehículos aereos no tripulados en entornos complejos