Contracts with Companies
Investigación, desarrollo e implementación para el aprendizaje y consulta del
lenguaje DACTYLS (DACTYLS, 2019-2021)
Funding: ONCE
Objective: Developing a platform that facilitates the learning of the communication language DACTYLS for the deaf-blind
Fase IV del Sistema de Planificación y Optimización Logística (SPOL)
(2018-2020)
Funding: ENAGAS
Objective: Maintaining and improving the management system developed in the previous phases
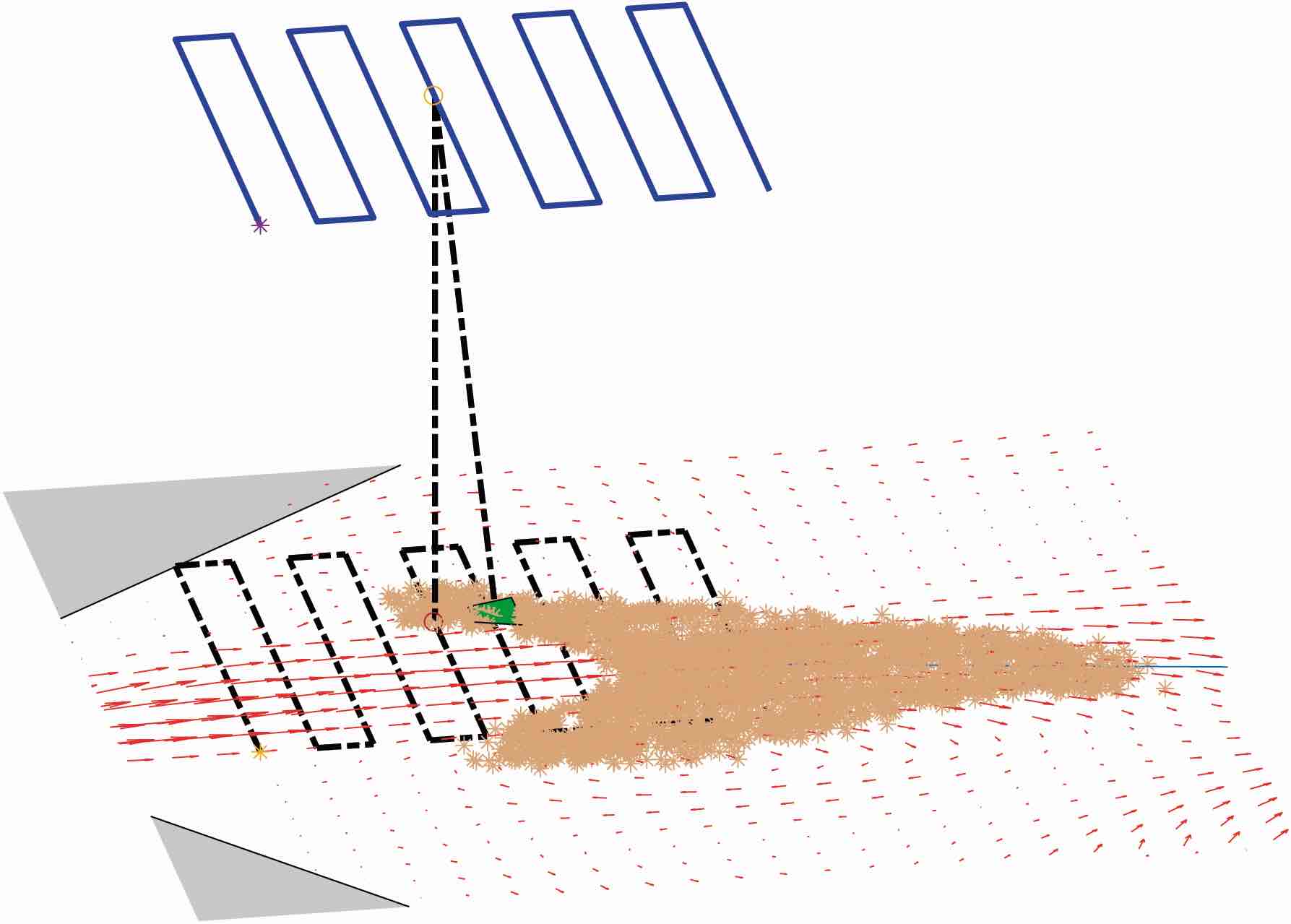
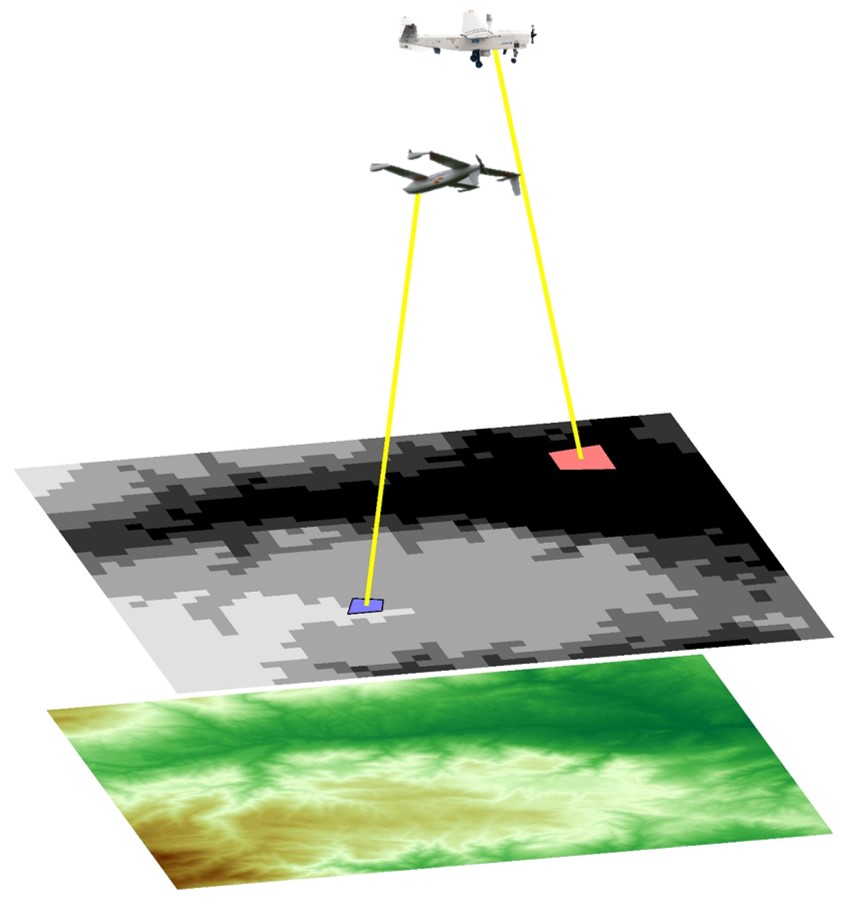
Mission Automation and Autonomy: Trajectory optimization for ISR missions
(MIAA, 2018)
Funding: AIRBUS DEFENSE
Objective: Developing unmanned aircraft trajectory planning algorithms to minimize the searching time of targets in the maritime environment.
Editor Científico (EDICO, 2016-2019)
(2016-2019)
Funding: ONCE
Objective: Developing a tool for people with visual disabilities, which allows them to edit scientific, mathematical, physical or chemical content in real time
Fase III del Sistema de Planificación y Optimización Logística (SPOL)
(2016-2017)
Funding: ENAGAS
Objective: Maintaining the management system developed in the previous phases
Multi-UAS Minimum Time Search in Dynamic and Uncertain Environments
(SAVIER-TD-02, 2013-2018)
Funding: AIRBUS DEFENSE
Objective: Developing of unmanned aerial vehicle fleet trajectory planning algorithms to minimize searching time of mobile targets in environments with uncertainty.
Fase II del Sistema de Planificación y Optimización Logística (SPOL)
(2012-2013)
Funding: ENAGAS
Objective: Improvements in the management system developed in Phase I of the project
Viabilidad de sensores basados en tecnología de fibras ópticas para la detección de
fugas de hidrocarburos (2012-2013)
Funding: CEPSA
Objective: Developing sensorial technologies based on fiber optics for the detection of spills of petroleum products in the sea.
Control de Actitud de Nano-microsatélites
(2010-2012)
Funding: INTA
Objective: Developing the complete ADCS of the INTA Nanosat-1B satellite: design, implementation, verification and in-flight qualification of the ADCS. INTA Microsat-1 satellite AOCS Technical Specification.
Control de Actitud mediante campo magnético terrestre para Nanosat-1B
(2010)
Funding: INTA
Objective: In-flight qualification of the AOCS sensor and actuator drivers of the INTA Nanosat-1B satellite. Recalibrating the sensors and developing a temporary ADCS.
Sistema de Planificación y Optimización Logística (SPOL)
(2010-2011)
Funding: ENAGAS
Objective: Developing a management and decision support system in the field of DRC gas supply logistics
Desarrollo de aplicación de segmentación y correspondencia semiautomática para imágenes de plantaciones de Populus (2010)
Funding: Centro de Investigación Forestal del Instituto Nacional de Investigación y Tecnología Agraria y Alimentaria (INIA-CIFOR)
Objective: Developing methods based on the analysis of textures and steroscopic correspondence in hemispheric images obtained with fisheye lenses in Populus plantations.
Control ACS NanoSat-1B y MicroSat-1 (2008-2009)
Funding: INTA
Objective:
Visión Esteroscópica para AUTO-ROVER: Investigación aplicada de autonomía
basada en imágenes para ROVER de exploración planetaria (2008-2009)
Funding: TCP SISTEMAS E INGENIERíA (fondos CDTI Ref. SAE-20081093)
Objective: Developing methods based on stereoscopic vision in adverse environments for trajectory planning and autonomous navigation of planetary exploration vehicles.
AUTO-ROVER: Estudio de autonomía basada en imágenes para Rover de exploración planetaria (2007-2008)
Funding: TCP SISTEMAS E INGENIERíA (fondos Consejería de Economía y Consumo de la Comunidad de Madrid, Ref. 04-AEC0800-000035/2008)
Objective: Developing methods based on stereoscopic vision in adverse environments for autonomous navigation of planetary exploration vehicles..
Análisis estereoscópico y reconocimiento de texturas en imágenes forestales
obtenidas mediante dispositivo de medición MU-200501738 (2007-2008)
Funding: Centro de Investigación Forestal - Instituto Nacional de Investigación y Tecnología
Agraria y Alimentaria
Objective: Developing computer vision algorithms to analyze the state of forest stands
Técnicas de tratamiento de imágenes orientadas a vehículos autónomos rovers en
la superficie de Marte (2007-2008)
Funding: TCP SISTEMAS E INGENIERÍA
Objective: Developing computer vision algorithms for the navigation of an autonomous vehicle on Mars
Evaluación de técnicas de inteliegencia articificial para la toma de decisiones y
optimización de estrategias (2006-2007)
Funding: EADS CASA
Objective: Evaluation of artificial intelligence techniques for planning routes for unmanned aerial vehicles in complex environments