Proyectos Europeos e Internacionales
Network Enabled Cooperation System of Autonomous Vehicles (NECSAVE, 2013-2016)
Financiación: European Defence Agency (A-919-ESM1-GP.04)
Objetivo general: Desarrollo, pruebas y evaluación de las herramientas y metodologías relacionadas con los enjambre (swarms) de vehículos aéreos y navales no tripulados bajo la filosofía NEC.
Objetivo específico: Desarrollo de un sistema de comunicación para la cooperación entre vehículos marino autónomos heterogéneos.
Robot Fleets for Highly Effective Agriculture and Forestry Management
(RHEA, 2010-2014)
Financiación: PP7 Large Collaborative Project European Comission (Grant n. 245986)
Objetivo general: Desarrollo de una flota autónoma de robots para la aplicación de tratamientos específicos en agricultura de precisión.
Objetivo específico: Desarrollo de métodos de visión por computador para identificar en tiempo real líneas de cultivo en maíz y localizar de forma precisa rodales de malas hierbas.
+ info
Análisis de Imágenes para el Control de Robots Autónomos (2008-2011)
Financiación: Fondo de Cooperación Internscional en Ciencia y Tecnología UE-México (FONCICYT, Ref. 93829)
Objetivo: Desarrollo de técnicas basadas en visión por computador con fines de autonomía en robótica.
Automated digital fuel system design and simulation process
(SmartFuel ADSP, 2006-2011)
Financiación: Sexto programa marco de Union Europea (AST5-CT-2006-030798)
Objetivo general: Modelo completo del sistema de combustible de un helicoptero, para validar control distribuido del sistema de combustible.
Objetivo específico: Desarrollo de herramienta automática de generación de código para microprocesadores de control y entorno de simulación.
+ info
Proyectos de Investigación Nacionales
Digitization and control of cyanobacteria applied to the management of the quality of
reservoirs, including water collection and purification systems (CYANOA, 2022-2025)
Financiación: Proyectos en Colaboración Público-Privada (CPP2021-008579).
Objetivo: Este proyecto competitivo de Colaboración Público-Privada
(en el que participan investigadores de la UCM y de la UAM, y las empresas FACSA y Eurofins-IPROMA)
tienen como objetivo digitalizar el proceso de gestión de la calidad y depuración de
las aguas de consumo en las que aparecen cianobacterias .
Objetivo específico: Desarrollo de una embarcación autónoma con sensores adecuados para detectar y localizar los blooms de cianobacterias.
+ info
Inspección y Mantenimiento en
Entornos Difíciles mediante Cooperación Multi-Robot (INSERTION, 2022-2025)
Financiación: Proyectos de Generación de Conocimiento (PID2021-127648OB-C33).
Objetivo: Este proyecto competitivo
(en el que participan investigadores de Universidad Pablo Olavide, de la Universidad Politéctica de Madrid y de la UCM)
tienen como objetivos el desarrollo de nuevas técnicas de percepción, localizaci&ón y
y cartografía en entornos difíciles; de navegación robusta y control preciso de robots en
entornos complejos, y de cooperación entre robots para escenarios complejos.
Objetivo específico: Desarrollo de técnicas de control posicionamiento dinámico para embarcaciones no tripuladas, y de cooperación de embarcaciones y drones.
Supervision y Control de Turbinas de Viento (SuMariNeW 2022-2025)
Financiación: Proyectos de Generación de Conocimiento (PID2021-123543OB-C21).
Objetivo: Es un proyecto competitivo coordinado,
en el que participan investigadores de Universidad de la UCM y del Pais Vasco. La propuesta coordinada aborda el análisis e implementación de una matriz de generadores undimotrices plug & play como sistema hidromecánico de estabilización de aerogeneradores flotantes (FOWT).
Objetivo específico: Desarrollo de nuevas técnicas de control multiobjetivo, y en la monitorización y supervisión de turbinas para mejorar su operación y mantenimiento.
Sistema IoT innovador orientado a la inclusión y mejora de la autonomía de personas con discapacidad visual (INNOVISION, 2022-2025)
Financiación: Proyectos de Generación de Conocimiento (PID2021-125596OB-I00).
Objetivo: Este proyecto competitivo
tienen como objetivo el desarrollo de un sistema de Internet de las Cosas que facilite la inclusión y la mejora de la autonomía de las personas con discapacidad visual.
.
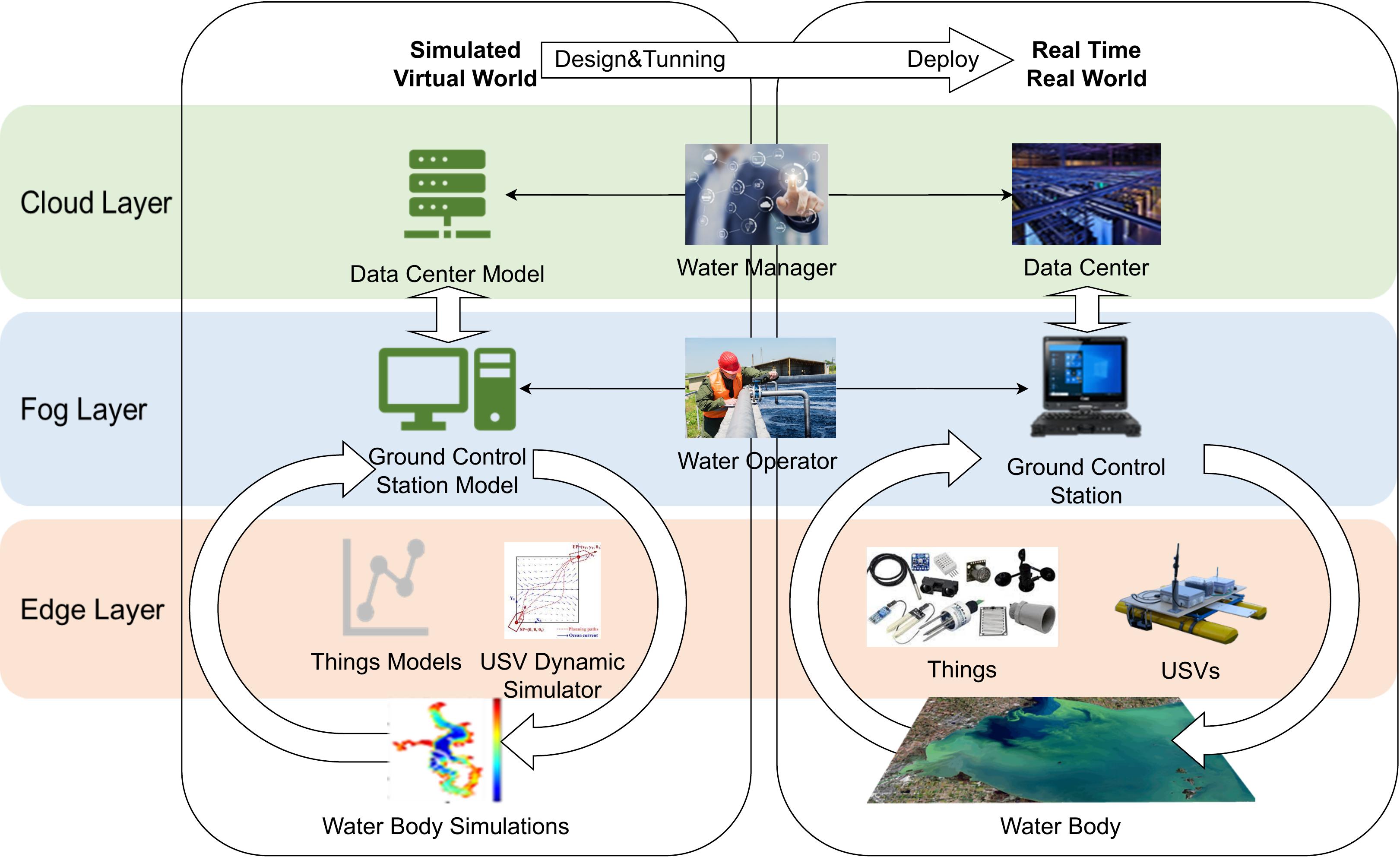
Más allá del uso de tecnologías digitales en blooms de cianobacterias: gestión inteligente de cianobacterias mediante el uso de gemelos
digitales y computación en el borde (SMART-BLOOMS, 2022-2024)
Financiación: Proyectos de Transición Ecológica y Digital (TED2021-130123B-I00).
Objetivo: Este proyecto competitivo de Transición Ecológica y Digital
(en el que participan investigadores de la UCM y de la UAM)
tienen como objetivo mejorar la digitalización del proceso de gestión de las cianobacterias que aparecen en diferentes masas de agua mediante la creación de un gemelo digital de todo el sistema y el uso de una infraestructura de IoT con computación en el borde.
Monitorización Automática de Contaminantes en Aguas Embalsadas utilizando Biosensores y Vehículos Autónomos de Superficie (AMPBAS, 2019-2021)
Financiación: RETOS-INVESTIGACIÓN (RTI2018-098962-B-C21).
Objetivo: Desarrollo de un sistema automótico multibarco, equipados con biosensores para detectar y alertar sobre la contaminación por microorganismos en aguas embalsada.
Análisis y control de un dispositivo flotante híbrido de energía eólica y marina (WINDWAVE, 2019-2021)
Financiación: RETOS-INVESTIGACIÓN (RTI2018-094902-B-C21).
Objetivo general: Tiene como objetivo el desarrollo de un sistema híbrido de generación de energía marina, consistente en una plataforma flotante para extraer energía de las olas y el viento.
Objetivo específico:Control de la turbina eólica flotante para optimizar su eficiencia y reducir las cargas estructurales.
+ info
Sistema autónomo para contención de vertidos en el mar
(SAVEMAR, 2014-2018)
Financiación: RETOS-COLABORACIóN (RTC-2014-2306-5)
Empresas participantes: CEPSA, PETRONUBA
Objetivo general: Desarrollo de un sistema autónomo de vehículos marinos de superficie (USVs) para detección temprana y contención de vertidos en el mar.
Objetivo específico: Desarrollo de métodos sensoriales (cámaras multi-espectrales, térmicas, radar, láseres, lídar) y de control para: la detección de vertidos, navegación autónoma de los USVs y el arrastre de barreras anticontaminantes.
+ info
Sistema Autónomo para la Localización y Actuación ante Contaminantes en el mar (SALACOM, 2014-2018)
Financiación: RETOS-INVESTIGACIóN (DPI2013-46665-C2-1-R)
Objetivo: Desarrollo de un sistema de actuación rápida, compuesto por vehículos autónomos marinos (USVs) y aéreos (UAVs), para la recogida de vertidos. Los USVs despliegan y arrastran una red de contención para la recogida de vertidos, mientras que los UAVs se encargan de localizar el contaminante e informar a los USVs.
+ info
Desarrollo de Sistema Submarino Autónomo (AUV, Autonomous Underwater Vehicle) para detección temprana de vertidos en líneas submarinas (2012-2015)
Financiación: Programa INNPACTO Ministerio de Economía y Competitividad (IPT-2012-0157-310000)
Empresas participantes: CEPSA, IXION
Objetivo general: Desarrollo de un AUV para la detección temprana de vertidos en líneas de transporte de crudo submarinas (sea-lines).
Objetivo específico: Desarrollo de técnicas sensoriales para la detección y navegación autónoma del AUV con sónares, cámaras multi-espectrales y láseres.
Sistema de vigilancia, búsqueda y rescate en el mar mediante colaboración de vehículos autónomos marinos y aóreos (2012-2013)
Financiación: CICYT DPI2009-14552-C02-01
Objetivo: Dotar a los sistemas de control de los vehículos marinos autónomos (VMA) de un nivel adicional que permita la navegación coordinada y colaborativa de un grupo de VMAs para tareas de vigilancia, búsqueda y recuperación de sustancias o naúfragos.
Sistema de Inspección Terrestre en Vehículos autónomos y su Aplicación efectiva a la Detección de Malas hierbas y su Control Localizado (GROW, 2012-2014)
Financiación: CICYT AGL2011-30442-C02-02
Colaboración: Centro de Automática y Robótica (CSIC-UPM)
Objetivo: Desarrollo de un sistema de percepción basado en cámaras de visión RGB para la detección y localización de malas hierbas en campos de cultivo de maíz, y para su integración en el sistema de control y navegación de vehículos autónomos agrícolas.
Plataforma de Planificación, Simulación y Sistema de Vigilancia, Búsqueda y Rescate en el Mar mediante colaboración de Vehículos Autónomos Marinos y Aéreos (2010-2012)
Financiación: CICYT DPI2009-14552-C02-01
Objetivo: Desarrollo de un sistema formado por vehículos marinos y aéreos autónomos cooperantes para llevar a cabo tareas de vigilancia, búsqueda y recuperación de sustancias o naúfragos en el mar.
Desarrollo de Métodos de Identificación de Texturas Naturales y su Localización Espacial mediante métodos de Visión Artificial (2009-2011)
Financiación: CICYT AGL2008-04670-C03-02
Colaboración: Centro de Automática y Robótica (CSIC-UPM)
Objetivo: Desarrollo de métodos de visión por computador para la identificación y localización de texturas naturales en campos de cultivo mediante un sistema de visión basado en cámaras operando en el espectro visible.
Sistema de control coordinado para vehículos marinos (2008-2009)
Financiación: Ciencia e Innovación CIT-370000-2008-8
Objetivo: Desarrollo de las capas de control necesarias para lograr la navegación coordinada y colaborativa de un grupo de vehículos marinos autónomos para diferentes tipos de tareas.
Plataforma de planificación, simulación y control para la colaboración de múltiples vehículos autónomos marinos y aéreos (2006-2009)
Financiación: CICYT DPI2006-15661-c02-01
Objetivo: Aplicación del enfoque MDA (Model Driven Architecture) y de DEVS (Discrete Event System Specification) para analizar y evaluar misiones con vehículos no tripulados (UV).
Extracción de Conocimiento Espacio-Temporal y Visión Artificial para la Automatización de Tratamientos Localizados (2005-2008)
Financiación: CICYT AGL2005-06180-C03-032
Colaboración: Centro de Automática y Robótica (CSIC-UPM)
Objetivo: Desarrollo de métodos de visión por computador para identificación y localización de elementos vegetales en campos de cultivo para aplicación de tratamientos selectivos.
Proyectos Comunidad de Madrid
Hacia un sistema Integral para la Alerta y GEStión de BLOOMs de cianobacterias en aguas continentales
(AI-GES-BLOOM-CM, 2021-2024)
Financiación: Comunidad de Madrid Y2020/TCS-
6420
Objetivo: Desarrollo de un sistema IoT para la alerta temprana y la caracterización eficiente de blooms de cianobacteria
en aguas embalsadas, mediante el uso de sensores embarcados en ASVs guiados por IA y de técnicas de
Modelado y Simulación.
Control de Sistemas Complejos en la LOGÍstica y producción de bienes y servicios
(COSICOLOGI, 2006-2010)
Financiación: Comunidad de Madrid S-0505/DPI/0391
Objetivo: Desarrollo de métodos de optimización con fines de planificación logística.
Otros
Planificación, optimización y control en sistemas con incertidumbre (POCOSIM, 2019-2020)
Financiación: Universidad Complutense de Madrid, Fondo Específico de Investigación
Objetivo: Desarrollo de tecnologías y métodos para el tratamiento avanzado de datos sensoriales, la planificación de misiones y optimización de trayectorias de vehiículos no tripulados en entornos con incertidumbre, y el control distribuido de los mismos.
Sensores Inteligentes (SENIN, 2018-2019)
Financiación: Universidad Complutense de Madrid, Fondo Específico de Investigación
Objetivo: Desarrollo de tecnologías sensoriales (cámaras RGB, térmicas, multi-espectrales, lídar) y métodos avanzados de tratamiento de datos (3D, deep-learning) para su integración en vehículos autónomos (UAVs, USVs, UGVs)